Pulse Induction Metal Detector – Work in Progress
In November 2023, I decided to build a metal detector. I had no previous experience in this field, and I didn’t do too well in analogue electronics back at uni in the ’80s.
I had just finished designing and prototyping Roverling MkII, a semi-autonomous, multi-terrain mobile robotic platform. I had many ideas for its first mission, but a friend suggested using it as a metal detector. There are heaps of designs and tutorials out there that have given me great ideas, but as always, I like to start from scratch and design and build a solution that suits me.
This blog is just my work-in-progress diary. When I’m finished, I’ll likely publish the entire project on Instructables and other maker sites.
1/11/23 Let’s Build a Metal Detector with no Previous Experience
There are heaps of designs and tutorials out there that have given me some great ideas, but as always, I like to start from scratch and design and build a solution to suit me. Although I prefer the digital domain and Python, it’s not going to be fast enough. The maximum sampling I’ve been able to achieve is 50 kHz, or about 20 µs, on an RP2040 running Python. Nowhere near quick enough. I need sub-microsecond samples to make this work, so I’m going to have to do a bit of analogue mixed-signal design.
The basic premise is to capture decaying pulse waveform levels at very specific times: the first one between 1–5 µs after the pulse is removed, and the next between 5–50 µs. Accuracy is absolutely key, so all analogue components will be used up to the sample-and-hold chip (300 ns capture, 100 µs hold). After that, an interrupt will trigger the slower RP2040 ADC reads, which will then store the data sample, synchronised with the GPS position, along with a small telemetry packet to ensure Roverling stays ‘on-mission.’ I’ll probably aim for 10k samples per second.
First step, though, is to replace my now-broken cathode ray oscilloscope—it has served me well for many decades. I’ve even got the original brochure. I tried, but it’s just not possible to properly design and tune this system without being able to see what’s happening at a 100 ns resolution. Luckily, my HP1630G logic and state analyser from the same era still works well, although it only samples at 100 MHz.
And it’s time to read some literature, especially since I’ve never even owned a metal detector. The following references were invaluable in this endeavour:
- Inside the Metal Detector by George Overton & Carl Moreland
- Hammerhead Pulse Induction Metal Detector by Carl Moreland
- Making a Fast Pulse Induction Mono Coil by Joseph J. Rogowski
- Coil Basics by Carl Moreland
- Designing Gain and Offset in Thirty Seconds by Bruce Carter (Texas Instruments SLOA097)
- Op Amps For Everyone by Ron Mancini (Texas Instruments SLOD006B)
16/11/23 New Oscilloscope
Christmas has come early—out with the old, in with the new. These old bits of kit have served me well for decades, but it’s time to move on. Thanks to EmonaInstruments for the great service and almost instant delivery. I wish I’d had one of these 30 years ago when I was teaching undergrads about metastability—it would have been much easier than trying to adjust the phosphor persistence on a cathode ray oscilloscope.
Next, I’d better download and read the manual.

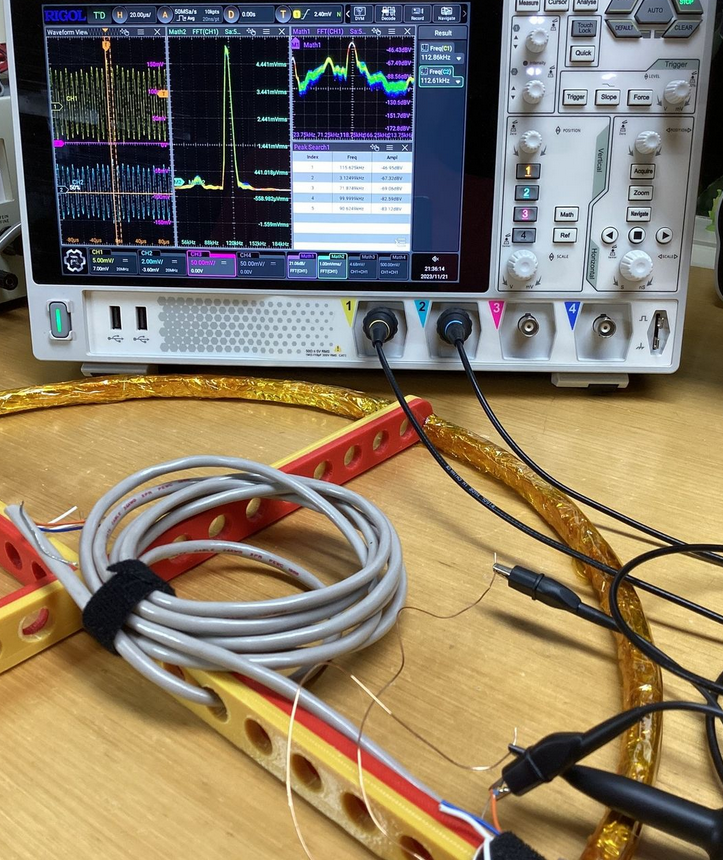
22/11/23 Design and Construct a Coil
Finally, all my bits are here, so let’s start building a search coil (v2). It’s 400 mm in diameter and constructed from four printed parts that are simply glued together. The inner race has 50 turns of 0.25 mm Teflon-coated silver/copper wire (wire-wrap wire) with an aluminium foil Faraday shield (no loop). This is the receiver and has a DC resistance of 20.1 ohms.
Over the top of the Faraday cage are 20 turns of 0.5 mm enamel-coated magnet wire, with a DC resistance of 2.1 ohms, which forms the pulse transmitter. Then, over the top of that is plenty of Kapton polyimide tape. It looks great on space missions, so why not use it here? (Plus, I no longer need it for holding down ABS prints.)
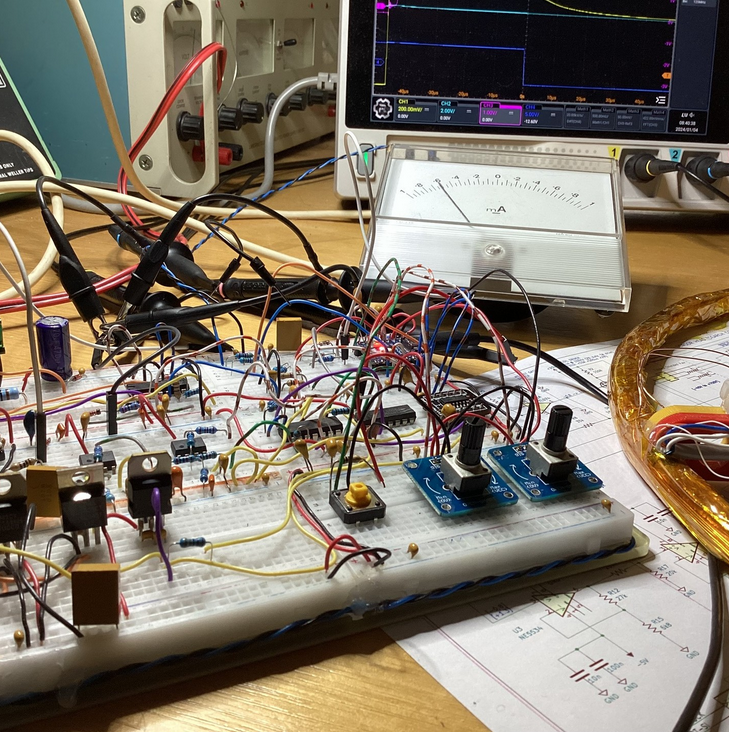
The next step will be to determine the critical damping requirements for both coils. To that end, I connected the (new) oscilloscope probes to the ends, expecting a 50 Hz signal, but that’s not what I saw. On the scope’s centre window, you can see the spectrum analysis, and that huge spike in the middle? Both coils are picking up something at exactly 118.75 kHz.
You can’t see it in this picture, but about 0.5 m away is my old monitor, which turned out to be fully responsible for this artefact.
Just goes to show that I’ll need an electromagnetically quiet place for calibration and testing.
6/11/23 First Coil – Working?
Analogue design is not my strong point, especially when it comes to inductors, but I’ve finally achieved some fantastic results with the coils. Firstly, I needed to create a bipolar totem-pole gate driver for the MOSFET. The parasitic capacitance can’t be overlooked if you want high-speed, non-linear FET switching. I used CircuitLab for the first time to simulate the circuit and was very happy with how quickly I could create the schematic and perform DC and AC analysis. This was critical in my choice of components for the totem-pole, though it wasn’t very useful for coil simulation.
The TX coil pulse is driven by a 100 Hz PWM output from the RP2040, with a duty cycle of 2^16 – 34 at 100Hz, giving a negative pulse of 5 µs. The TX coil needs to be critically damped to prevent unwanted ringing on the RX coil, which I achieved with a 220-ohm resistor. A maximum current of 10 A is realised within the first 1 µs, which suggests this should be the turn-off time. However, I’ve found much better results with a 5 µs pulse at the RX end, with diminishing returns beyond that.
The RX coil is not damped, as I couldn’t see any need for it on my oscilloscope, even though theory might suggest otherwise. The RX output is clipped in both directions using two 1N4148 diodes.
If you look carefully at my computer monitor, you’ll see the aqua (persistent) plot. The top of the envelope indicates no metal, while the bottom of the envelope shows its presence. Without any amplification, the difference is in the order of 500 mV within the 10–50 µs decay time frame.
I couldn’t have hoped for more at this stage.
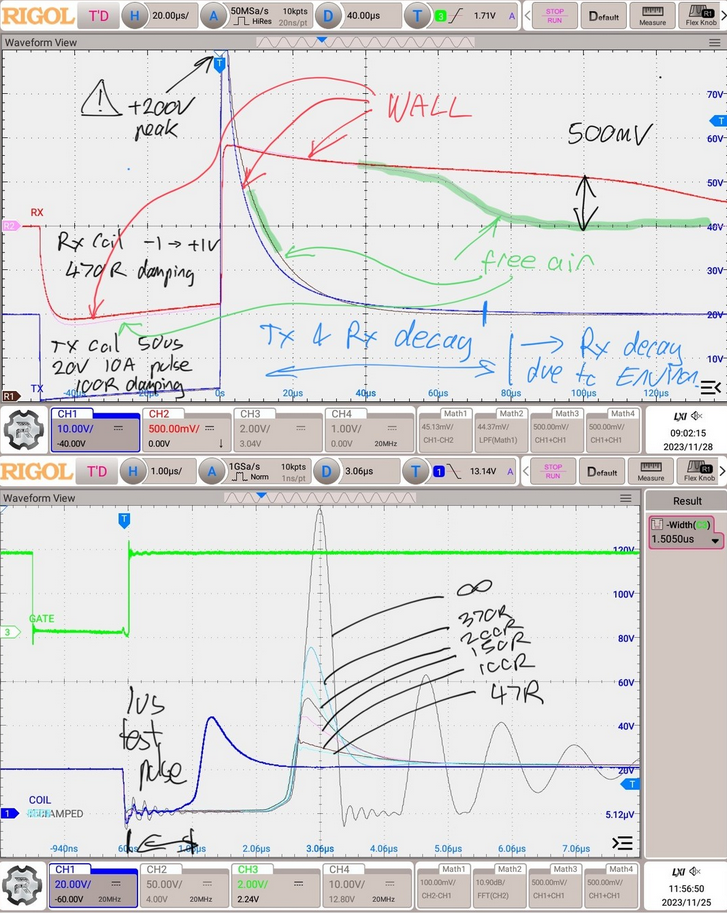
28/11/23 Wrong Coil Design
Most of the research I’ve done up to this point suggests using a short pulse width, with most sampling occurring in the 5–25 µs decay time frame. However, for my coils, this didn’t seem to provide the large voltage detection swing I was hoping for on the RX coil.
If I drive 10 A through 2 ohms for 50 µs, I get a much better result. The top chart shows the difference in RX coil voltage between free air and a wall with foil sarking. At about 40 µs after the impulse, there’s a massive difference, reaching 500 mV within another 60 µs. Interestingly, there are also detectable changes in the TX coil from 0–80 µs after impulse removal, as well as another change on the RX coil 5 µs into the pulse itself.
There’s a lot of useful information here, but the next step is to test with real dirt and real objects at various depths. I’ll then determine what voltage levels and/or sample time frames to use. Some machine learning could be really useful here. I’d also read that using only an 8-bit ADC wouldn’t provide usable data, but now I’m not so sure. Let’s first see what the RP2040 can achieve before complicating things further.
The bottom chart shows earlier damping tests of the TX coil. This resulted in selecting a 200-ohm damping resistor for the TX coil; HOWEVER, I had to reduce this to 100 ohms to also critically damp the RX coil. I then added specific damping to the RX coil only, which ended up being 470 ohms. Since they effectively form a tuned circuit, I used potentiometers on both until I achieved the desired waveform. Without first tuning (and ensuring your 10x probes are properly compensated), there’s no hope of obtaining the results shown in the top chart.
12/12/23 Getting the Hang of Op-Amps
Prototype 1 is complete—but a failure. It can detect a large object at 100 cm, but small close objects go undetected. The biggest mistake? Observing waveforms through ‘rose-coloured glasses’ using all the filtering, smoothing, and analysis capabilities of my new Rigol scope. When switching to high resolution at 2 GS/s and 16 bits, a different story emerges: one filled with noise that completely swamps the signals I’m looking for. Using a long display persistence highlights the problem areas even more clearly.
Now, I’m working on attempt #2 with a much better understanding of op amps. If you’re a rusty engineer like me, you can’t go past Op Amps For Everyone, a Texas Instruments design reference guide (SLOD006B). It’s a tough read but pointed me in the right direction.
The TX coil only becomes fully saturated at about 200–250 µs, so I’m now driving it for exactly 200 µs, resulting in a peak coil current of around 4.5 A. After the RX coil output is clipped to ±1 V, it passes through an NE5534 op amp (primarily an audio op amp) based preamplifier with a gain of 10 and an LPF set at 180 kHz. Next, it passes through another NE5534 with a gain of 13, giving the system an overall transfer function of 30 to 80 mV input maps to -3.3 V to +3.3 V output.
At 60 µs after the end of the TX pulse (but measured on the RX coil), a CD4066-based CMOS switch samples and holds the voltage.
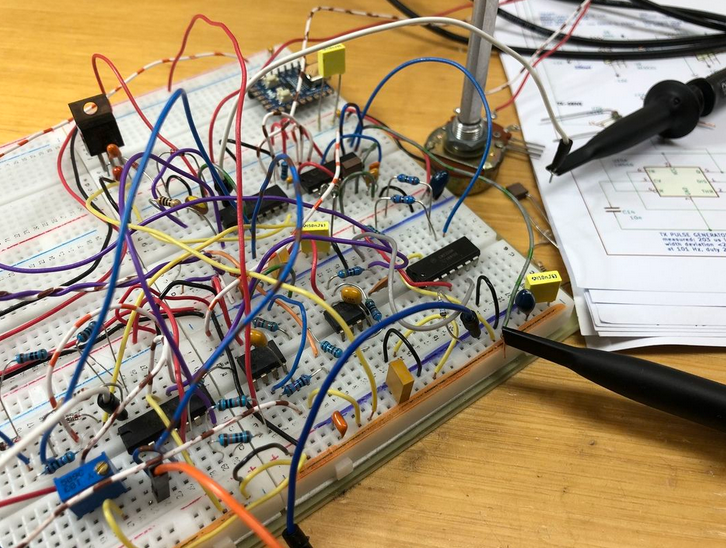
This region (55–65 µs) provides the best signal-to-noise ratio. Sampling earlier than 55 µs results in poorer differentiation, while sampling later than 65 µs falls into the noise floor. Bench testing looks very promising—small objects are now easily detected, noise is largely gone, response time is quick, and I’m getting a clean and held voltage in the range of -3.3 V to +3.3 V. And all of this is working on a solderless breadboard!
The next step is to route this signal into an ADC (after attenuation and level shifting) and bring it back into the digital domain, where I’m most comfortable, for further development.
12/12/23 Learning (but in hindsight looking in the wrong area)
Following on from my previous post, here are the results.
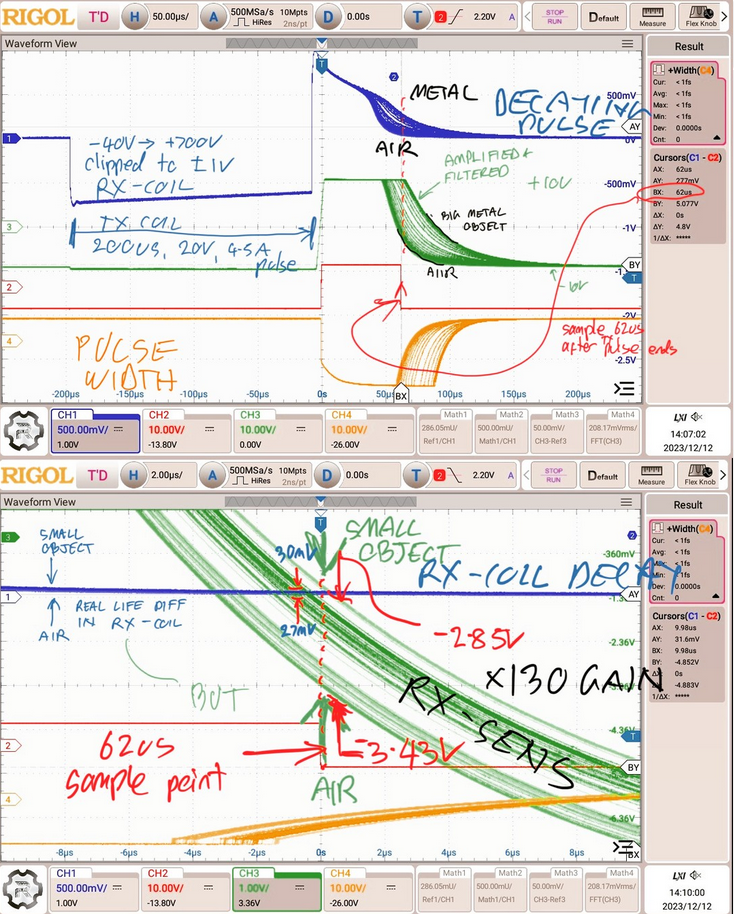
The top chart, at 50 µs/div, shows a very large piece of metal—not a realistic test scenario but still impressive, packing a punch even at 0.5 m. The blue plot shows the received pulse decaying and highlights a sweet spot to measure changes: right at 62 µs after the TX pulse ends.
The second chart zooms in to 2 µs/div. At this level, only the value at 62 µs is relevant. At this point, the RX coil voltage (blue line) for air versus a small metal object is 27 mV and 30 mV, respectively. However, in the midst of the fuzzy noise, it’s nearly imperceptible—just a faint, straight-line difference.
Adding a few op amps to filter and amplify the signal, with a gain of x130, transforms the result into the green line. Now, the readings at 62 µs are 2.85 V for air and 3.43 V for a small metal object—a significant improvement.
4/1/24 Not Happy
Three prototypes later, and I’m still not entirely satisfied with the design. I can now detect a very small metal object at about 40 cm, but the system’s high gain makes it quite unstable. The RP2040, paired with a bit of Python, helps compensate somewhat, but it’s clear I’ll need something better if I want to fully automate the search process using Roverling Mk.ⅠⅠ.
Version 3 introduced targeted gain at a specific sample time after the impulse. Right now, the sweet spot seems to be at 47.6 µs, where I’m seeing a voltage change from about 220 mV to 225 mV. The Python code automatically adjusts the baseline, allowing me to amplify just the critical part of the signal. I even display the amplified result on an old-style meter driven by the RP2040 using differential PWM. However, the op-amps I’m using currently have a slew rate of around 13 V/µs, and I’d need something closer to 100 V/µs after amplification to properly resolve the ‘sweet spot.’
Now, Version 4 is on the drawing board. I plan to use higher-performance op-amps (since I now understand them much better) for the input and preamp stages. I’ve also decided to abandon the RP2040’s underwhelming 12-bit ADC. For $30, I can get a 24-bit oversampling ADC with a flat passband digital filter and external sync (critical for my application), with an SPI interface, made by Analog Devices. Honestly, I probably should have taken this route from the start.
11/1/2024 Fly-back Decay Curve
Version 5 is now underway, focusing on a full-scale read of the bottom 5 V of the fly-back decay curve. The coils have been redesigned, thanks to some fantastic online reference materials. Previously, RX coil response sampling couldn’t occur before 45 µs and was more reliable around 65 µs. With this new design—overlaying a circular receive coil under an elliptical transmit coil—mutual coupling has been significantly reduced, allowing sampling to begin at 10 µs. This is a major improvement, particularly for gold detection.
A big thanks to element14 for supplying the precision components. In theory, 32 bits of filtered data over 5 V should provide an LSB resolution in the range of 1.2 nV.
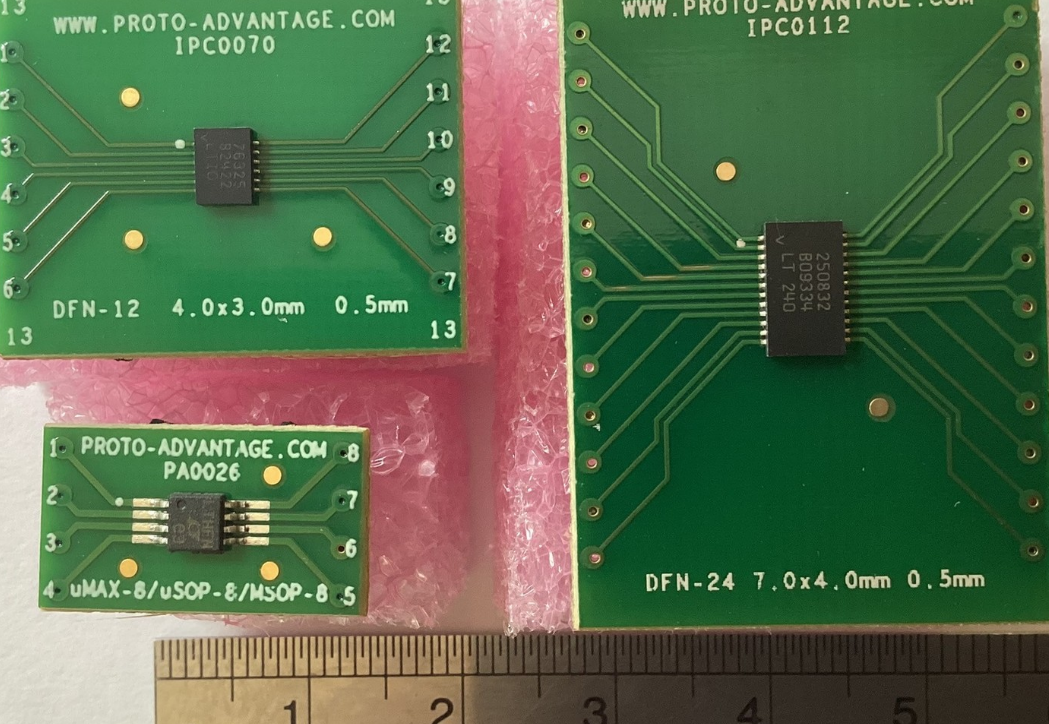
Next problem: these parts no longer come in DIL packages. They’re really small, and I’ll need to solder them by hand… wish me luck!
29/1/2024 Too Small
After numerous attempts to solder 0.2 mm wire onto 0.25 mm pads spaced just 0.5 mm apart, I’ve come to the conclusion that I need SMT-to-DIP adaptors. Luckily, I discovered Proto Advantage. Not only do they have all the adaptors I need for this project, but they’ll also procure and solder those tiny components onto the PCB for me.
Awesome! Now I’m just waiting on delivery from Canada.
30/1/2024 New Coils
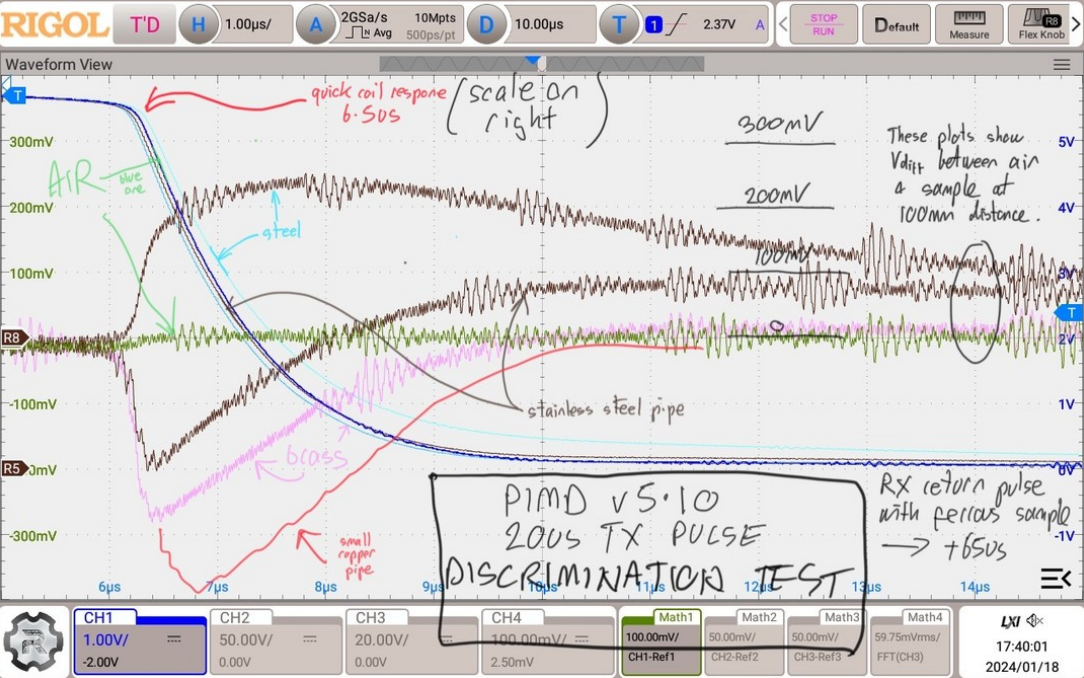
Version 2 coils have now been redesigned and are working extremely fast. Even with 2 m of RG62A/U coaxial cable, I can sample down to 7 µs. Discrimination is surprisingly effective, although I can’t test with gold yet since I don’t have any on hand. 🙂 The elliptical coil has proven to be a real game-changer for me.
From my research, most pulse induction detectors only examine the bottom 700 mV of the decay curve. However, in my testing and with my coil, I found the most useful information lies between 500 mV and 5 V. Not only is there significantly more information in this range, but it’s also well above the noise margin, making filtering far easier.
I also examined the response at voltages above 5 V. While I could sample 650 ns sooner in the best-case scenario, this only yielded a 10% improvement—hardly worth the additional effort.
31/1/2024 Finding the Sweet Spot
I conducted a controlled test to evaluate the discrimination characteristics of the dual elliptical coil design across various induction pulse periods. The charts display the difference between the baseline and the target object within the 5–20 µs sample period. The vertical resolution is set to 10 mV/div, with a noise component of ±10 mV.
Kicking goals now…
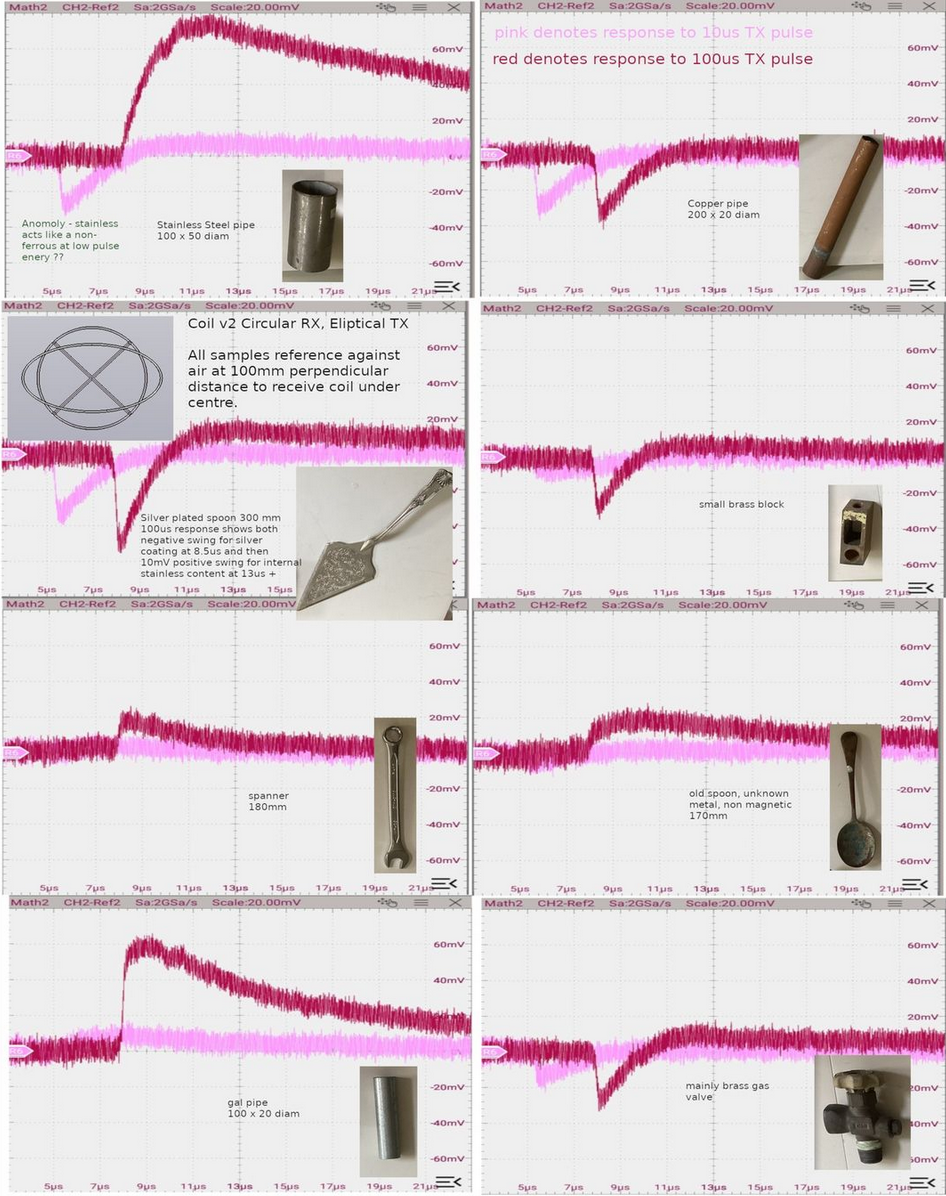
Test objects

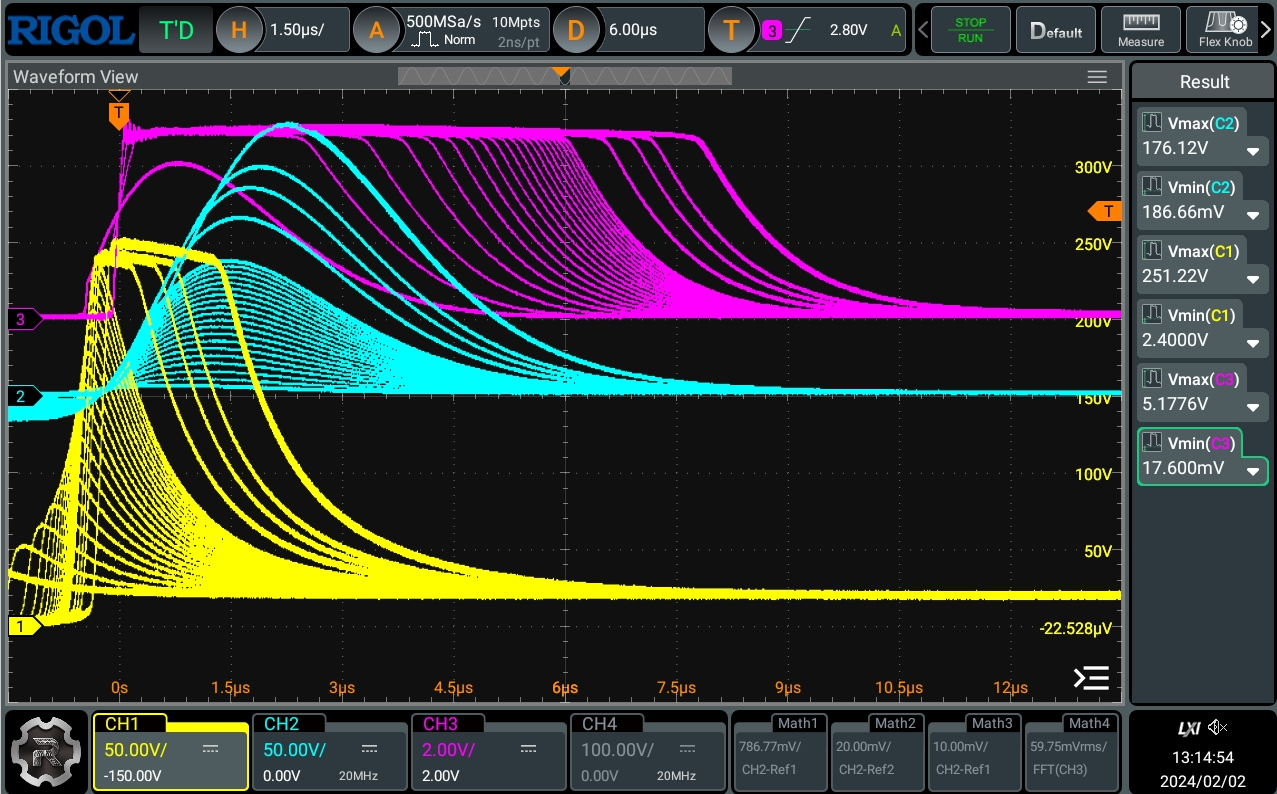
2/2/2024 High Voltage
Impulse response versus TX pulse width (h/w/v513) tested with the following increments: first 1–20 µs, then 30, 40, 50, and finally 100 µs.
- Yellow: TX pulse, fly-back reaches 251 V
- Blue: RX pulse, fly-back reaches 176 V
- Pink: Conditioned sample, 5 V max
7/2/2024 Super Fast Sample Time
Automatic sample timing search: h/w v5.14 (RP2040 ADC), s/w v2.08, coil v2.01. The most optimal solution was determined using a natural logarithmic function. With a 5 µs pulse, sampling can begin at 4.5 µs, and with a 50 µs pulse, sampling starts at 7.6 µs, enabling the detection of non-ferrous metals.
The function used:
math.e ** (SampleIndex * 0.3) - 1
13/2/2024 Integration
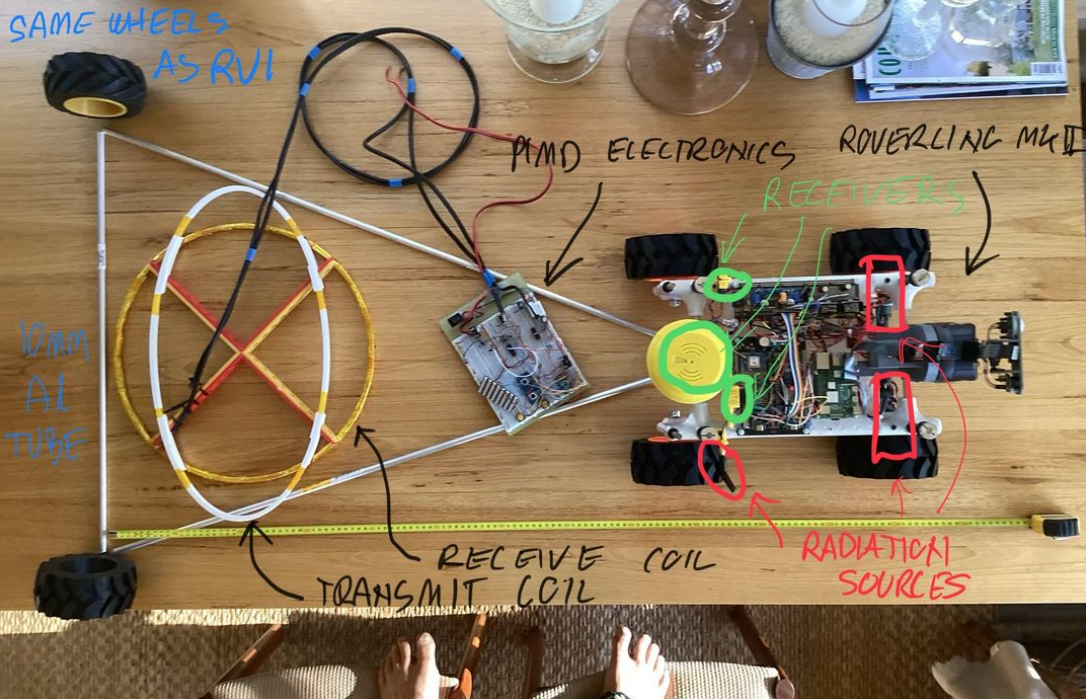
The Pulse Induction Metal Detector (PIMD) project now meets Roverling MkII. Welcome to Stage 2: Integration.
After many months of development, I’ve managed to build a pulse induction metal detector from scratch. While I’m still waiting on better ADCs to arrive before designing a PCB, the PIMD works surprisingly well with the RP2040’s 12-bit ADC. With a transmit pulse ranging from 5–50 µs, I can sample as early as 4.5–7.6 µs, allowing for excellent discrimination between different metals. Taking it a step further, I can also roughly estimate the proportion of ferrous to non-ferrous material.
I’m using a 8×8-LED matrix as an indicator. This effectively serves as a colour-coded bar chart:
- X-axis: Sample time (I take 20 samples, average them, and then apply an LPF at 8 distinct points).
- The first point is determined by searching for the first time the RX return level drops to 95% of the initial detectable voltage.
- The remaining 7 points are spaced using a natural logarithmic function that accurately matches the decay response.
- Y-axis: The difference (in mV) between the current averaged sample and the reference sample.
Precise timing is critical, and I’ve managed to reduce sample timing jitter to under 10 ns. Python on the RP2040 isn’t ideal, as running the PWM frequency at 1 kHz introduces a rounding error (likely), causing 100 ns of jitter. However, switching to 2 kHz resolves this issue. For synchronisation between TX and RX, it’s also essential to use PWM channels from the same slice.
The next step is to integrate the PIMD with Roverling MkII. I plan to use a standard trailer configuration with a tow bar, suspending the sensor coil just above ground level. While I’d prefer carbon fibre or plastic for the frame, I’ll be using 10 mm aluminium rod for now (ensuring there are no loops). Although the PIMD can calibrate around this and maintain a reliable baseline, aluminium in the frame theoretically reduces sensitivity.
Roverling’s onboard electronics present some challenges:
- Noise sources:
- A radio transmitter.
- Two unshielded 11W motors, generating significant interference.
- GPS shielding: The GPS receiver on board is particularly sensitive to pulse noise.
To mitigate this, I plan to position the coils at least 0.5 m from the vehicle. The PIMD electronics, which are also highly sensitive, will be mounted halfway along the trailer for optimal isolation. Additionally, the 40 V vehicle power supply is too noisy, so I’ll be adding yet another Ryobi battery dedicated solely to the PIMD.
Time to fire up FreeCAD and start designing and printing more parts. Let’s get this prototype rolling!
15/2/1024 Massive Power Boost – 6yo Test Driver
Roverling MkII has had its power supply upgraded from 20 V to 40 V to provide the extra torque needed to tow the PIMD sensor trailer up hills. However, with this additional power comes increased speed—so naturally, I handed the controls over to a 6-year-old to test its stability.
Needless to say, I’ll be adding roll bars before any further “junior testing.”
19/2/24 Proto Advantage
Thanks, Proto Advantage—my parts have finally arrived from the US after three weeks in the post. Looks like my designs are no longer limited to through-hole technology components. Long live SMT!
Not only do they have all the adaptors I need for this project (and likely future ones), but they’ll also procure parts from DigiKey and solder those tiny components onto the PCBs for me.
24/2/1024 Oversample
The new oversampling ADC is now connected and provides two outputs: a 14-bit no-latency value and a 32-bit filtered and decimated value.
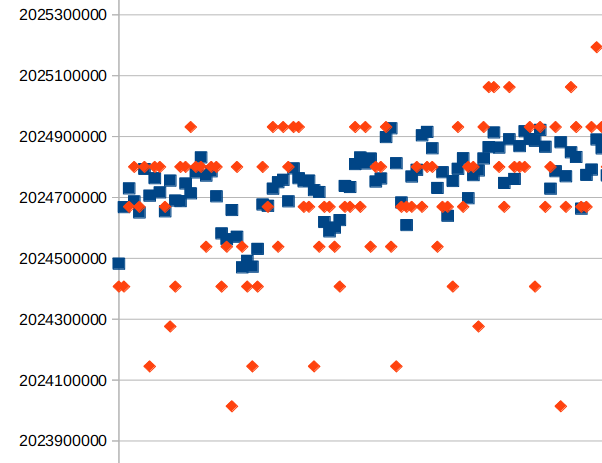
The next step was to determine whether the filtered output offers any advantage. The filtering process involves oversampling and decimation by a factor of 256, meaning at 2 kHz sampling, each sample takes roughly 125 ms. Additionally, seven sample periods are required to account for the group delay response to an impulse. This is compared to using eight different sample points at 120 samples per point—significantly more than I had initially planned.
Both methods show a similar response to slow-moving metal objects:
- The first dip is a silver spoon.
- The next bump up is galvanised pipe.
- The final dip is copper pipe.
The vertical scale for this comparison is 11.6 mV/div.
With all other variables held constant:
- Noise in filtered samples (blue) is approximately ±450 µV.
- Noise in raw samples (red) is approximately ±1400 µV.
The left scale represents the adjusted value for 32 bits, where V = x / 2^31 * 5, resulting in 465 µV/div.
The key decision is whether to pursue multiple sample times or a single sample time with higher resolution. While multiple sample times allow for better discrimination when ferrous and non-ferrous metals are present together, the only significant advantage occurs after the first sample time. Given this, it likely makes more sense to proceed with the single-sample approach for simplicity and efficiency.
26/2/2024 Making Progress
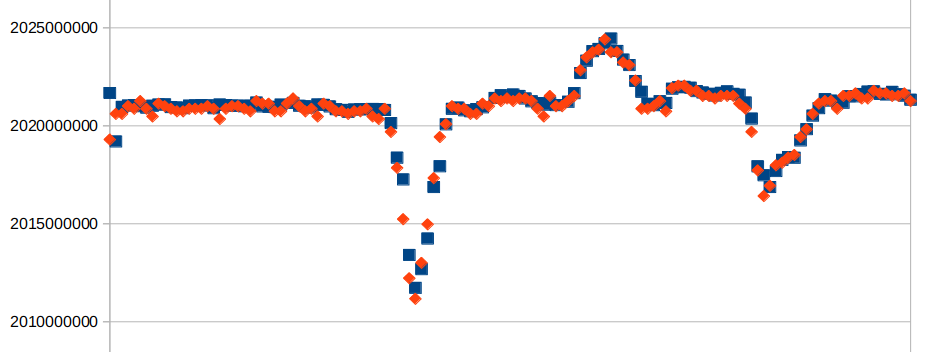
I’ve now coded the system to use the filtered 32-bit data after the initial baselining and sample timing is determined using the raw 14-bit data. The next step was to analyse the characteristics of different pulse widths as an object is passed over a period of 5 seconds. The horizontal axis of the chart represents time, covering about 30 seconds, while the vertical axis shows the integer representation of the ADC filtered value.

The results so far have been absolutely great! 🙂
- Silver spoon and copper pipe: Both show identical responses for 20 µs and 40 µs pulses.
- Ferrous pipe:
- Almost no response at 10 µs.
- Displays a strange “after-response” when the object is removed.
Increasing the pulse width results in an almost linear increase in sensitivity to ferrous objects but shows only a modest improvement in response to non-ferrous objects.
I’ve traded the ability to collect samples at 8 different points for higher resolution and less noise, but it seems there may be potential for greater discrimination by varying the pulse width. However, there’s one significant challenge:
Heat generation: At higher pulse widths, the system generates more heat. This heat causes slight drifting in the pulse-driving circuitry, which, in turn, leads to substantial drift in the sensitive receive circuitry.
Finding ways to manage the heat and mitigate its effects on circuit stability will be critical moving forward, especially if pulse-width adjustments are to be used for discrimination improvements.
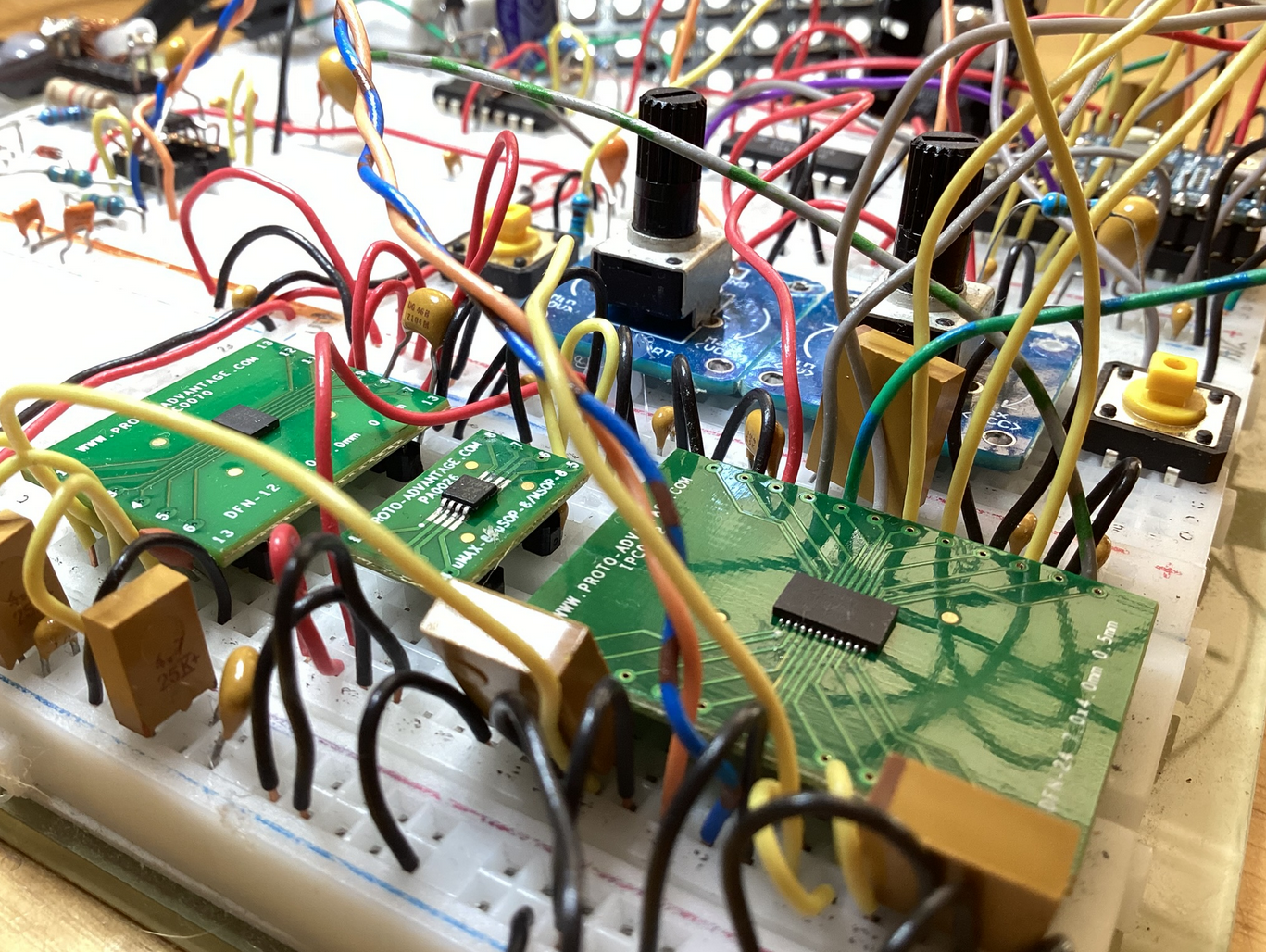
29/2/2024 Printed Circuit Board
It’s time for a PCB before any more fine-tuning to squeeze out those last few percent gains. I suspect the solderless prototype board is now the main contributor to the noise floor.
It’s been 20 years since I last designed a PCB, so there’s a bit of relearning ahead. Back then, I used the very expensive Mentor Graphics software on Apollo Unix Workstations. Now, I’m switching to KiCad—a free, well-supported tool with a large library, running on my free Ubuntu OS on an Intel platform.
While KiCad doesn’t have an auto-router, I’m not too concerned. I’ve always enjoyed the maze-like challenge of manually routing a tight board. I’m sure there will be plenty of frustrations along the way, but I’m looking forward to diving back into the process.
3/3/2024 Ryobi Battery Problem
Before designing the PCB, I needed to tidy up a few things. First, I shortened the leads to the coils from nearly 2 m (used for testing) to about 50 cm. As expected, this reduced the parasitic capacitance significantly, which was evident because the damping resistor on the transmit coil needed to be increased from 220 Ω to 490 Ω. This, in turn, made the coil even faster—now, with a 20 µs pulse, I can sample as soon as 5.8 µs, making gold detection easier.
Next, I replaced my bench power supply with a Ryobi battery pack, which I use for most of my projects. You’d think a modern battery would be quieter than my ancient power supply, but after a frustrating day of investigation, I discovered that’s not the case.
Every 128 ms, I collect a digitally filtered 32-bit representation of the decaying voltage. Most of the time, the measurements are very stable, with deviations of less than 1 mV. However, every 15 seconds or so, there’s a massive variation lasting about half a second, enough to ruin any accurate detection during that time.
Here’s an excerpt of the data:
10866ms 0x6a797184 4.1591558456V diff: -0.531mV
10988ms 0x6a7ae6b2 4.1593780518V diff: -0.309mV
11131ms 0x6a79da94 4.1592183113V diff: -0.469mV
11254ms 0x6a77b9d9 4.1588935852V diff: -0.794mV
11377ms 0x6a773a09 4.1588172913V diff: -0.870mV
11500ms 0x6a781620 4.1589488983V diff: -0.739mV
11642ms 0x6a680a63 4.1565003395V diff: -3.187mV
11765ms 0x69c88efc 4.1321654320V diff: -27.522mV
11888ms 0x688ad5af 4.0836844444V diff: -76.003mV
12011ms 0x687c80b7 4.0814976692V diff: -78.190mV
12154ms 0x69b79a6b 4.1295781136V diff: -30.109mV
12276ms 0x6a64f890 4.1560320854V diff: -3.655mV
12399ms 0x6a799e2b 4.1591825485V diff: -0.505mV
12542ms 0x6a797779 4.1591591835V diff: -0.528mV
12665ms 0x6a7891de 4.1590223312V diff: -0.665mV In the measurements above, you can see the stability in the data, followed by a sudden, massive variation.
I connected the oscilloscope to the Ryobi battery pack, and even with no load, the battery exhibits a strange behaviour every 15 seconds. It appears to be performing some kind of internal check.
The yellow line marks the end of the excitation pulse, the green line represents the last 5 V of the received decay, and the rising blue edge shows the exact sample point. With persistence turned up, you can clearly see shadows in the transmit and receive pulses dipping briefly—enough to interfere with accurate detection.
Zooming in on the spikes reveals that each event lasts around 1 ms, with a voltage drop of nearly half the battery’s total voltage.
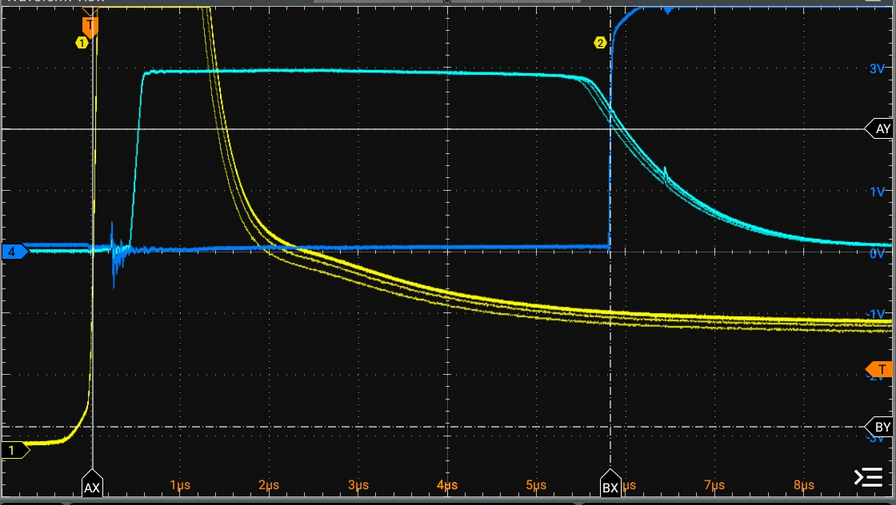


The Ryobi battery pack is clearly unsuitable for sensitive applications like this. I’ll need to find a quieter, more stable power source for this project. No more Ryobi battery packs for precision work!
9/3/2024 Drift
Next problem to solve – drifting component parameters, especially when going to full power on the drive circuitry. This phenomenon doesn’t work well with the static baselining I have been doing up to now, but it has it’s place for pinpointing edges so I’ll keep it in the system.
What I really thought I needed was a high pass filter. I found a much better solution using statistics, in particular the standard deviation function. In the below chart, the blue line is the filtered/decimated ADC 32 bit data, decimal scale on the right axis. The green is the standard deviation, and the red is the standard deviation multiplied by the sign of the difference of the sample at the beginning and end of the sample. Bottom scale is time in ms.
From left to right, first blue run with 20us pulse, passing samples at 150mm Ag, Fe, Fe, Ag. Next run turned up pulse width to 50us which heats up the power resistors somewhat. I didn’t wait for it to stabilise so drift down is evident. Samples Ag, Ag, Fe, Fe. You’ll notice a much bigger response to ferrous metals. Last run turned the pulse (effective power) down to 5us. Samples Ag and Ag followed by a hold over samples Ag & Ag.
The next issue to address is drifting component parameters, especially when running the drive circuitry at full power. This phenomenon doesn’t work well with the static baselining I’ve been using so far. However, static baselining still has its place for pinpointing edges, so I’ll keep it in the system.
Initially, I thought I needed a high-pass filter to handle this issue. Instead, I found a much better solution using statistics, specifically the standard deviation function.
In the chart below:
- Blue line: Filtered and decimated 32-bit ADC data (right decimal scale).
- Green line: Standard deviation of the data.
- Red line: Standard deviation multiplied by the sign of the difference between the sample values at the start and end of the sample window.
- Bottom scale: Time in milliseconds.
- First Run:
- Pulse width: 20 µs.
- Passed samples: Ag (silver), Fe (iron), Fe, Ag.
- Stable operation, minimal drift.
- Second Run:
- Pulse width: 50 µs (increased power).
- The power resistors heated up, causing noticeable drift (downward trend in the blue line).
- Passed samples: Ag, Ag, Fe, Fe.
- The response to ferrous metals (Fe) is much larger with the increased pulse width.
- Third Run:
- Pulse width: 5 µs (reduced power).
- Passed samples: Ag, Ag, and then, Ag, Ag but slowly.
Using standard deviation and its signed adjustment provides a dynamic way to account for drift, without relying solely on static baselining.
Increasing the pulse width significantly improves ferrous metal detection, but it also introduces drift due to component heating. Conversely, shorter pulses reduce power consumption and drift but provide smaller signals.

14/3/2024 Power System Noise
Following on from the Standard Deviation edge detector, I’ve implemented a simple state machine to better detect changes and their direction. Now that this has been refined, it works very well up to about 20 cm, after which the noise becomes significant. It’s time to work on reducing noise, even though I’m still using a solderless breadboard.
The plan was to untether the USB connection used for code development, but that turned out to be harder than expected. Initially, I used the RP2040’s onboard flash memory to store data while disconnected, but this caused at least a 10-fold increase in the noise floor, even with an additional half dozen capacitors added. Once I identified the issue, I configured a single UART TX pin to output the data instead, eliminating the need for USB connectivity or onboard flash storage.
What surprised me most is that noise is about 50% lower when the RP2040 is powered via USB—either from a PC or a plug pack—compared to using the onboard 7805 regulator with the 20 V supply. Nothing I’ve tried has resolved this, and I suspect a proper PCB may help reduce the noise further.
Another major improvement came from changing the pulse and sampling frequency. I was initially using 4 kHz, but since it isn’t a prime number, there seemed to be a beat frequency in the noise. Changing to 3719 Hz reduced the noise by half.
Current baseline noise standard deviation over 10 samples in free air:
- 200 uV USB powered, no flash
- 250 uV Battery powered, no flash
- 900 uV USB powered, using flash
- 4000 uV Battery powered, using flash

16/3/2024 Critical Component
I accidentally blew up a critical component due to my dodgy solderless breadboard and loose wires. While I wait at least three weeks for the SMT replacements to arrive from Canada, I’ve decided to bite the bullet, relearn PCB design using KiCad, and finally get a proper PCB designed and manufactured.
30/5/2024 Creating Roverling Vehicle Control System
While waiting for replacement components, I began work on RV3, an updated version of Roverling based on the previous MkII, but specifically designed to operate autonomously with the metal detector.
It’s almost complete, but outdoor development has stalled due to rain. One of the final tasks is achieving accurate GPS steering. At the moment, I can achieve about 0.5 m accuracy, but for this project, I’ll need a GNSS RTK-capable module. I’m currently searching for a good but affordable option.
Fortunately, there are a couple of nearby government Continuously Operating Reference Stations, and their free NTRIP correction streams should allow me to achieve 2–3 cm accuracy.

8/7/2024 Roverling in Control
It’s taken some time, but the Roverling control system is now working well.
The first level of control uses a magnetometer, calibrated offline using all three axes for sphere re-mapping, and then calibrated again on the Roverling itself using only the X and Y axes with a figure-of-eight manoeuvre. However, the magnetometer is only accurate when horizontal, which is problematic when Roverling is navigating up, down, or across hills. To address this, tilt compensation is applied based on pitch and roll, which are derived from a three-axis accelerometer. Unfortunately, the accelerometer can only determine pitch and roll while stationary, which isn’t helpful when moving.
The next level of control comes from the GPS. While helpful, there are still limitations until I can integrate an RTK module. For now:
- The best update interval is once per second.
- Precision is around 18 cm.
- Accuracy, after locking onto approximately 20 satellites and allowing 15 minutes to stabilise the fix, is about 50 cm.
While there’s room for improvement, the system is good enough for now.
The chart below shows GPS position during fully autonomous control:
- First test: A 40 m run on a varying 10-degree slope. Roverling stays within a 1 m corridor.
- Second test: A series of ‘slots’ on flatter ground, 10 m long, with tight turning circles at each end. Again, Roverling maintains a 1 m corridor.
It’s a promising start!

12/7/2024 PCB Arrives
The first PCB I’ve designed in many years has arrived and is working with only a few minor issues. I’m now in the process of testing and calibrating it.
So far, it looks like I’ve managed to achieve a minimum sampling delay of around 4 µs and approximately 10 µV of precision on my timed 32-bit ADC sampling.
A great step forward!

1/8/2024 First Integration Test
The first integration test is complete! The power systems are working well, and RS232 communications between the PI trailer and Roverling are solid. I’m getting 30 updates per second from the PI’s 32-bit ADC via LoRa, streaming back to my desktop computer.
However, there’s an issue: it seems the coils are too loose, and the wires are shifting relative to each other during the shaking and bumping. To address this, I’ll coat the wiring in epoxy to stabilise it and also work on making the trailer lighter.
A few more tweaks, and it should be ready for further testing!
23/12/2024 New Coil Design – Version 3

I’ve gone back to basics with a version 3 coil, focusing on making it stable. This design consists of two rectangular coils epoxied onto a 6.25 mm glass substrate, protected underneath by a polycarbonate sheet.
- Transmit Coil:
- Dimensions: 520 x 360 mm
- 10 turns of 0.5 mm (24 AWG) enamelled magnet wire
- Length: 17.6 m
- Resistance: 1.7 Ω
- Receive Coil:
- Dimensions: 430 x 265 mm
- 50 turns of 0.25 mm (30 AWG) Teflon-insulated, silver-plated copper wire-wrap wire
- Length: 30.8 m
- Resistance: 22.9 Ω
Many designs I’ve seen include a series resistor in the drive circuit for the TX coil. I experimented with this and found that reducing the resistor from 9.4 Ω to zero only slowed the response by 0.6 µs but significantly increased depth penetration.
Although this version performs well on the bench, it’s very heavy, and the front-wheel-drive Roverling struggles to maintain traction. I’ll need to revisit the design to reduce the weight while maintaining stability.
2/1/2025 New Coil Design – Version 4
I’m exploring alternative materials and techniques to develop a better solution for keeping the coils rigid while reducing weight.
The Version 3 coil, while stable and functional, proved to be too heavy for the front-wheel-drive Roverling, causing traction issues.
The goal is to maintain stability and durability without compromising the performance gains achieved in the previous version. Time to get prototyping!
16/2/2025 Field Tests
Coils v4 is now complete. I used a piece of 12mm thick perspex and had slots routed to house the coils. The receive coil is shielded by copper tape, and then both coils are embedded in perspex. For the initial field testing I’ll use this ‘pusher’ and a laptop to monitor using this newly created GUI.

I have now developed a Python-based GUI to interface with the RP2040 acquisition MCU. The timing between the removal of the transmit pulse and the subsequent acquisition of the receive pulse is accurate to within 15 ns. Once the coils and circuitry have warmed up, the standard deviation of the received signal is typically better than 100 µV.
The slope seen in the data below is due to the system still warming up. Nonetheless, it’s clear that ferrous metals (steel spanner) are detected as positive spikes, while non-ferrous metals (piece of copper pipe) produce negative spikes. The polarity difference happens because ferrous metals store magnetic energy, reinforcing the decay field (positive spike), while non-ferrous metals induce opposing eddy currents, weakening the field (negative spike).
Through testing, I’ve found that the optimal setup is a 40 µs transmit pulse, generating a peak current of 7 A. Sampling at 8.4 µs provides the best results, as this is when the 100V+ signal has been critically damped to around 3V. The system runs at a 5 kHz pulse rate, with a decimation filter of 256, providing 20 samples per second.
I’ve already detected a few large underground spikes but haven’t dug them up yet to see what they are.

22/6/2026 — Back from the Shelf
It’s been over a year since my last entry. I kind of lost interest and got busy on other projects.
Where I left off it actually worked in the field. I found a 90-year-old brass dipstick about 30cm down, an old buried enamelled steel plate and some sash window weights, pushing the coil on wheels around and watching the laptop. No real ground discrimination, just doing it manually from the GUI.
Then a couple of things happened that completely changed the trajectory.
For a very short period I got access to Fable 5, Anthropic’s newest model. I wanted to give it a real test, so I looked through my project directory for something meaty and maybe unfinished. I found PIMD and thought that will do. I fed in the Python source code, all my notes, this diary, schematics, screenshots, oscilloscope plots, etc. I then asked Fable to do a deep review against commercially available equipment, specifically pointing out good and bad points. Was I even in the ballpark?
It pointed out some flaws, but also uncovered things I wanted to do but didn’t — mainly because of the programming effort required. I knew I would be fighting Python at this level, and it would take me forever. But the other thing I have wanted to do for a while was to learn how to use Claude Code.
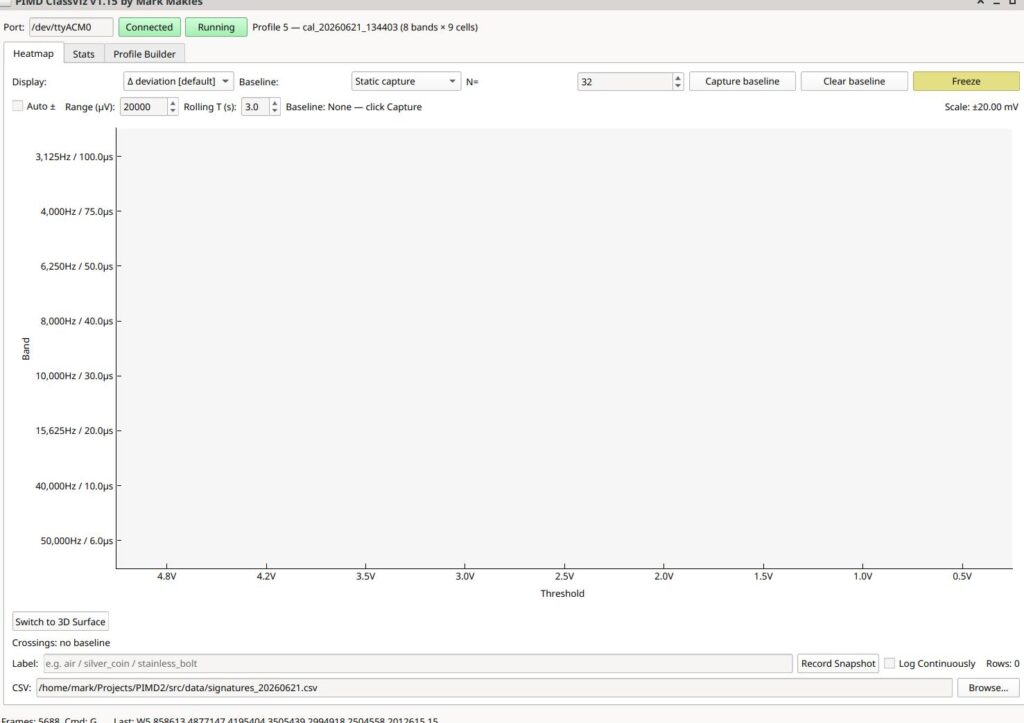
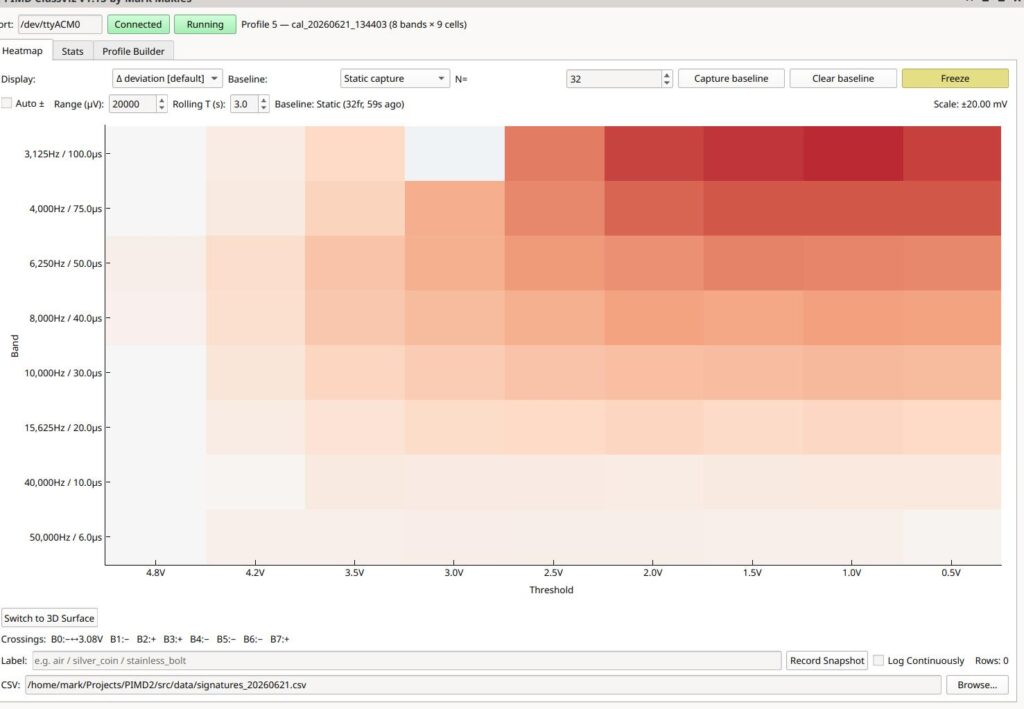
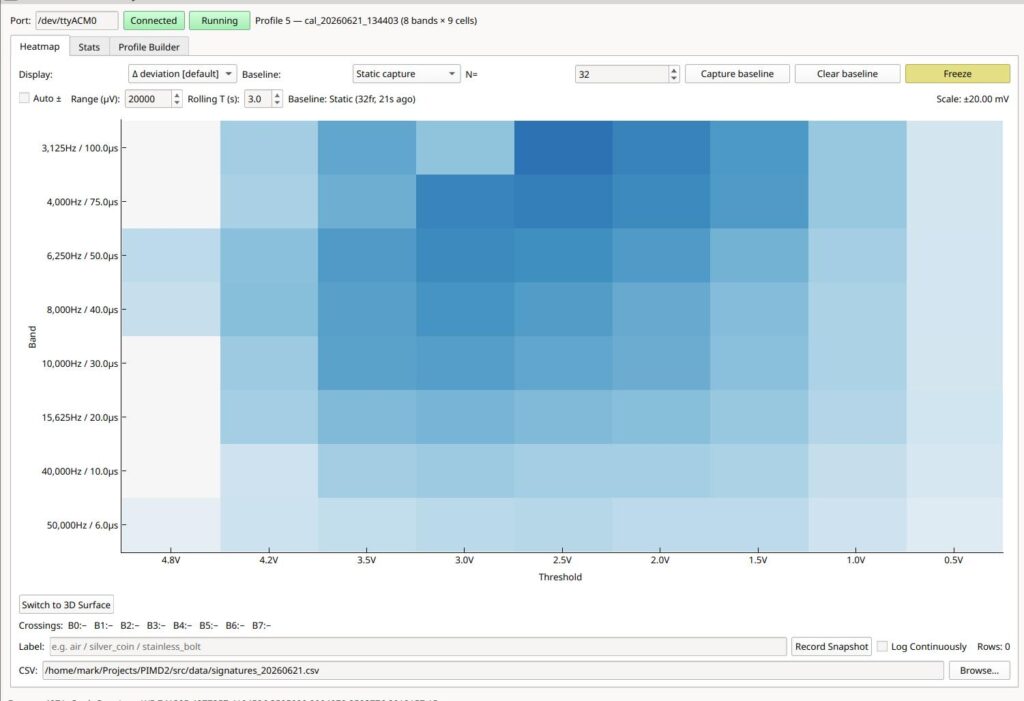
So inside a week all the bugs and mistakes with my firmware and GUI were sorted out, and new functionality added, which I could never have done myself in a reasonable time. Two new PC apps were created: pimd_delaycal.py, which automatically determines exact timings for acquisitions, and pimd_classviz.py, a tool to visualise the data. The aim is to eventually get these vectors into ML for classification and ground discrimination.
I got AI to do another review and now it’s calling it
“a low-cost, monostatic time-domain electromagnetic (TEM) spectrometer doing cued interrogation.”

I’ve decided to publish everything to date on GitHub: the firmware, the three PC tools, the KiCad project, a full engineering reference and the per-tool docs. It’s a work in progress, but someone may find it useful.
Next step, me learning machine learning. The entire point of that n-cell matrix is that it’s built from the ground up to be a classifier input, for filtering, for ferrous/non-ferrous classification and for the real stretch goal, ground discrimination.
There’s some refinement to come, possibly trimming the cell count for a faster response, but only once I’m certain I’m not throwing away hidden information in those extra cells, and a front-end revision to retire a 1990s MOSFET I’ve been running rather harder than its datasheet would like. And one day design a proper PCB.